ios
计算机组成原理
嵌入式Linux SPI驱动
分类
激活函数
小目标
存储型XSS
CAS原子锁
静态
Cartographer
遥感预处理
后台开发
线程同步
材料计算
指针空值nullptr
预训练模型
EDM营销
IO-Link
可执行程序
子不语
3D目标检测
2024/4/12 8:31:29
Pointpillar 论文解读
Pointpillar 论文解读
主要贡献:
这篇文章的主要贡献在于 “Fast Encoder”, 也就是将点云稠密的Pillar(上文提到2847个)**输入给网络,**这才是这篇论文的精髓所在, 这大大提升了识别速度, 论文写可以达到62Hz.仅使用2D卷积层进行端到端学习PointPillars uses a n…

OpenPCDet复现过程记录
0、前言 OpenPCDet项目之前我就复现过,一个很优秀的项目,这几天又需要用到这个项目,再次复现遇到了不少问题,特此记录复现的流程 1、环境准备
1.1、前置条件
以下是我安装的版本
CUDA 11.3CUDNN 8.2.1 CUDA和CUDNN安装可以参考…
3D目标检测跟踪 | 基于kitti+waymo数据集的自动驾驶场景的3D目标检测+跟踪渲染可视化
项目应用场景 面向自动驾驶场景的 3D 目标检测目标跟踪,基于kittiwaymo数据集的自动驾驶场景的3D目标检测跟踪渲染可视化查看。
项目效果 项目细节 > 具体参见项目 README.md (1) Kitti detection 数据集结构
# For Kitti Detection Dataset
└── k…
![[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal](https://img-blog.csdnimg.cn/27da0a0c762c4279ba124084b06e0ec9.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5YeM6Z2S5769,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)
[BEV系列]BEVFormer: Learning Bird’s-Eye-ViewRepresentation from Multi-Camera Images viaSpatiotemporal
论文链接:https://arxiv.org/pdf/2203.17270v1.pdf 代码链接:https://github.com/zhiqi-li/BEVFormer 1. 摘要(Abstract) 3D视觉感知任务,包括基于多摄像头图像的3D检测和地图分割,对于自动驾驶系统至关重要…
![[Mono Depth/3DOD]单目3D检测基础](https://img-blog.csdnimg.cn/162a517ac7514ba88941c1f985230b50.png#pic_center)
[Mono Depth/3DOD]单目3D检测基础
1.数据增强
图像放缩和裁剪后,相机内参要做相应变化
import random
def random_scale(image, calib, scale_range(0.8, 1.2)):scale random.uniform(*scale_range)width, height image.sizeimage image.resize((int(width * scale), int(height * scale)))cali…
3D目标检测(毕业设计+代码)
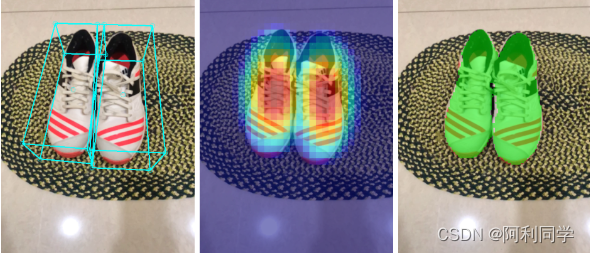
概述
3d Objectron是一种适用于日常物品的移动实时3D物体检测解决方案。它可以检测2D图像中的物体,并通过在Objectron数据集上训练的机器学习(ML)模型估计它们的姿态. 下图为模型训练后推理的结果!
算法
我们建立了两个机器…
CV计算机视觉每日开源代码Paper with code速览-2023.11.21
点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【基础网络架构:Transformer】Multi-entity Video Transformers for Fine-Grained Video Representation Learning 论文地址&…
3D目标检测框架 MMDetection3D环境搭建 docker篇
本文介绍如何搭建3D目标检测框架,使用docker快速搭建MMDetection3D的开发环境,实现视觉3D目标检测、点云3D目标检测、多模态3D目标检测等等。
需要大家提前安装好docker,并且docker版本> 19.03。 1、下载MMDetection3D源码
https://gith…

BEVFusion复现 (Ubuntu RTX3090)
https://github.com/ADLab-AutoDrive/BEVFusion
1.环境安装
我的机器是RTX3090,CUDA11.1 1.创建虚拟环境 conda create -n bevfusion python3.8.3 2.安装PyTorch 和 torchvision pip install torch1.8.0cu111 torchvision0.9.0cu111 torchaudio0.8.0 -f https://…
CV计算机视觉每日开源代码Paper with code速览-2023.10.30
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【语义分割】(NeurIPS2023)SmooSe…

3d目标检测_Top1的3D目标检测方法----已开源
转自公众号:计算机视觉之路原文链接:头条 | Top1的3D目标检测方法----已开源mp.weixin.qq.com一、SA-SSD在birds eye view任务中,效率与精度并存的SA-SSD论文:http://www4.comp.polyu.edu.hk/~cslzhang/paper/SA-SSD.pdf代码&am…

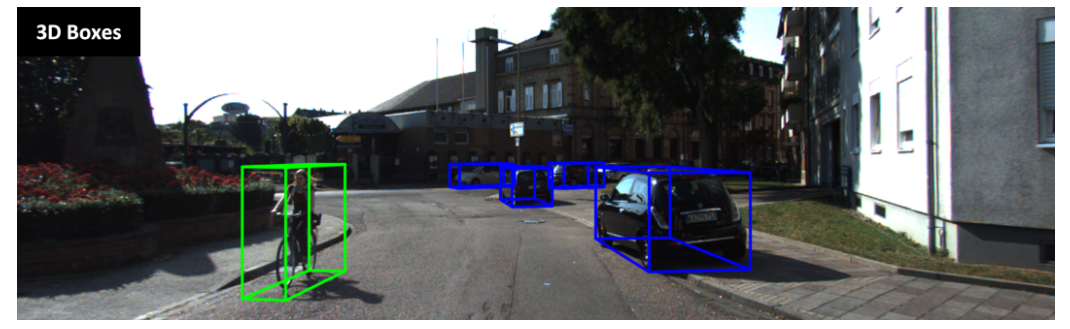
新版mmdetection3d将3D bbox绘制到图像
环境信息
使用 python mmdet3d/utils/collect_env.py收集环境信息
sys.platform: linux
Python: 3.7.12 | packaged by conda-forge | (default, Oct 26 2021, 06:08:21) [GCC 9.4.0]
CUDA available: True
numpy_random_seed: 2147483648
GPU 0,1: NVIDIA GeForce RTX 3090
…
【论文解读】单目3D目标检测 MonoCon(AAAI2022)
本文分享单目3D目标检测,MonoCon模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。 目录
一、MonoCon简介
二、论文核心观点
三、模型框架 四、模型预测信息与3D框联系
五、损失函数
六、…
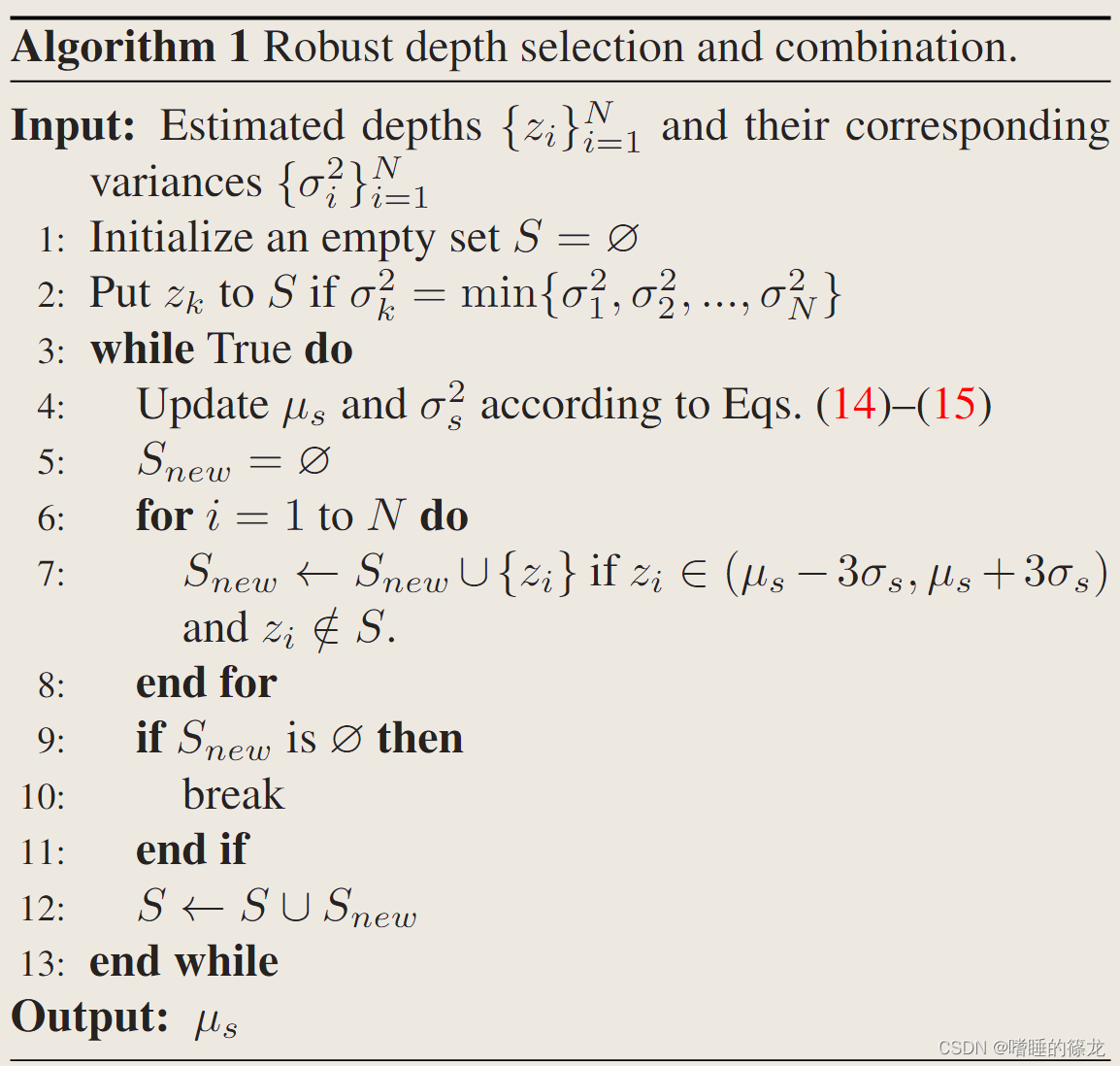
【单目3D目标检测】MonoDDE论文精读与代码解析
文章目录PrefacePros and ConsAbstractContributionsPreliminaryDirect depth estimationDepth from heightPespective-n-point(PnP)PipelineDiverse Depth EstimationsRobust Depth CombinationOutput distributionSelecting and combining reliable de…
CV计算机视觉每日开源代码Paper with code速览-2023.11.6
精华置顶 墙裂推荐!小白如何1个月系统学习CV核心知识:链接 点击CV计算机视觉,关注更多CV干货
论文已打包,点击进入—>下载界面
点击加入—>CV计算机视觉交流群
1.【点云3D目标检测】(NeurIPS2023)…
【论文解读】单目3D目标检测 LPCG(ECCV 2022)
本文分享单目3D目标检测,LPCG模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。 目录
一、LPCG 简介
二、论文核心观点
三、思路框架
四、核心观点——单目3D目标检测的标签中,…

3D目标检测数据集 DAIR-V2X-V
本文分享国内场景3D目标检测,公开数据集 DAIR-V2X-V(也称为DAIR-V2X车端)。DAIR-V2X车端3D检测数据集是一个大规模车端多模态数据集,包括: 22325帧 图像数据22325帧 点云数据2D&3D标注 基于该数据集,可…

自动驾驶高效预训练--降低落地成本的新思路(ReSimAD)
自动驾驶高效预训练--降低落地成本的新思路 1. 引言定义高效预训练 2. ReSimAD2.1引言2.2 主要贡献1.发布大规模ReSimAD数据2.ReSimAD pipeline 2.3 实验 上海人工智能实验室
1. 引言 高效的预训练,是大模型的第一步 大模型的两种能力
海量数据分布–未知场景泛化…

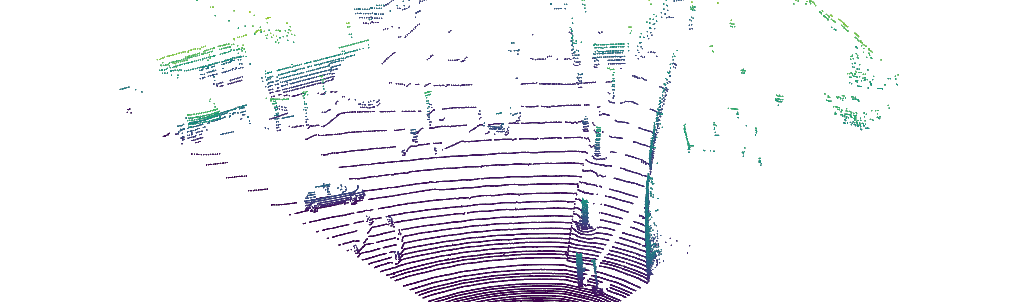
近期开源 | 激光雷达点云的3D目标检测 | 论文
近期开源的 | 激光雷达点云的3D目标检测 | 论文1. HVPR——《Hybrid Voxel-Point Representation for Single-stage 3D Object Detection》2021.42. SE-SSD——《Self-Ensembling Single-Stage Object Detector From Point Cloud》 2021.41. HVPR——《Hybrid Voxel-Point Repr…